Спрос на электромобили будет увеличиваться в среднем на 38% ежегодно, согласно прогнозу по развитию рынка электромобилей в России. Соответствующие данные предоставили аналитики из консалтинговой компании Strategy Partners.
26–27 марта 2024 года в конференц-зале ЦВК «Экспоцентр» (Москва) прошла ежегодная научно-практическая конференция «Российский рынок систем электрохимического накопления электрической энергии и батарейных систем электротранспорта. Проблемы и перспективы». Эксперт «РТСофт-СГ» выступил с докладом о комплексном подходе к проектированию развития инфраструктуры заряда электротранспорта.
Николай Шубин | АО «РТСофт»
Алексей Небера | АО «РТСофт»
Иван Абраменко | АО «РТСофт»
Задача регулирования напряжения и реактивной мощности в распределительных электрических сетях хорошо известна и различными способами решается в электроэнергетике уже много десятков лет. Однако всё более широкое использование средств распределённой генерации создаёт новые аспекты, которые необходимо учитывать при управлении, а новые средства измерений и информационных технологий позволяют обеспечить качественно новый уровень решения этой проблемы. В статье рассматривается метод оптимизации электрического режима по напряжению и реактивной мощности, не опирающийся на априорное знание модели сети и характеристик нагрузки и использующий новые возможности, предоставляемые средствами синхронизированных векторных измерений.
Введение
В связи с прогнозируемым развитием распределённой генерации ожидается значительное увеличение числа регулируемых источников реактивной мощности (ИРМ), включённых в распределительные электрические сети. Наличие управляемых ИРМ создаёт потенциальную возможность для повышения качества электроэнергии по напряжению и снижения технических потерь в сетях среднего и низкого напряжения. Согласно экспертной оценке снижение потерь может достигать до 10% от их текущего уровня. В то же время, в отсутствие соответствующей технологической подготовки, большое количество источников с независимым автоматическим регулированием может привести к прямо противоположным результатам – к неоптимальности электрического режима с увеличением потерь, а также к технологическим проблемам, проявляющимся в форме низкочастотных колебаний напряжения и обменных потоков реактивной мощности. Для того чтобы всё же извлечь потенциальную выгоду от увеличения числа ИРМ, необходима координирующая автоматическая система, оптимизирующая электрический режим сети по потокам реактивной мощности и уровням напряжения (далее – QU-оптимизация). На первый взгляд, построение такой системы не должно вызывать затруднений. Достаточно, например, реализовать её путём циклического запуска классического программного обеспечения QU-оптимизации на регулярно актуализируемой математической модели электрической сети с последующей рассылкой вновь рассчитанных законов управления на регулируемое оборудование. Однако при более внимательном рассмотрении выясняется, что вторжение управляющих систем в режим напряжения в сетях низкого напряжения существенным образом изменяет значения узловых нагрузок (ввиду непосредственной близости потребительских энергоустановок к этим сетям). Неучёт или некорректный учёт статических характеристик активной и реактивной нагрузок по напряжению в связи с отсутствием фактических данных об их параметрах, а также в связи с изменением этих параметров в течение суток может приводить к увеличению потерь электроэнергии вместо их желаемого снижения.
Далее приведено описание подхода к решению задачи QU-оптимизации, основанного исключительно на электрических измерениях, при котором в качестве оптимизируемой модели выступает сама физическая энергосистема со всем многообразием своих фактических характеристик.
Формулировка задачи
Цель QU-оптимизации – минимизация потерь активной мощности π(U̇) в электрической сети при соблюдении ограничений. Целевая функция оптимизации π(U̇)→min.
Предлагаемый подход к QU-оптимизации построен на применении синхронизированных измерений векторов (PMU-измерений) напряжений в узлах наблюдаемой электрической сети. Решение оптимизационной задачи осуществляется в темпе реального времени с учётом фактических регулирующих эффектов нагрузки по напряжению и частоте. Решение не требует выполнения традиционных расчётов с использованием расчётной модели в едином центре.
Подход основан на идее безмодельной QU-оптимизации электрического режима, описанной в [1]. В отличие от оригинальной идеи [1], в предлагаемом подходе вместо телеизмерений потоков активной и реактивной мощности в электрических связях и модулей напряжения на шинах использованы PMU-измерения векторов узловых напряжений оптимизируемой схемы. Это позволяет существенно сократить количество необходимых для QU-оптимизации измерительных преобразователей.
Запишем выражение целевой функции (потери мощности в электрической сети), используя исключительно векторные параметры напряжения и проводимости элементов сети:
![]() (1),
(1),
где: n – количество узлов в оптимизируемой схеме; i,j – номера узлов, ограничивающие ветви схемы; Gij=Rij/Zij 2 – активная проводимость ветви сети, ограниченной узлами i и j ; Ui,Uj – модули измеренных векторов напряжений в узлах схемы, δij=δi–δj, δi и δj – их фазовые углы, U̇ – вектор напряжения, характеризующийся модулем и фазовым углом.
Для трансформаторных ветвей ij вместо Uj в формуле (1) и далее в формулах производных (2), (3), (7) будет использоваться Uj/KT, где KT = WHH(CH)/WCH(BH) – коэффициент трансформации трансформатора (число, меньшее или равное единице).
Очевидно, что выражение (1) может вычисляться в темпе реального времени по факту поступления PMU-измерений векторов напряжений.
Для минимизации потерь мощности в сети путём воздействия на управляемые реактивные мощности источников Qm и коэффициенты трансформации трансформаторов Kт необходимо вычислить частные производные целевой функции π(U̇) по указанным переменным, считая что U̇i и U̇j являются неявными функциями от Qm и Kт, Используя правила дифференцирования неявных функций, получаем выражение для частных производных целевой функции:
– по реактивной мощности источников Qm формулу (2),
– и по вещественным коэффициентам трансформации трансформаторов Kт формулу (3).
 (2),
(2),
 (3),
(3),
На практике могут встречаться комплексные коэффициенты трансформации, причём двух видов – с зависимым и независимым регулированием модуля и угла или вещественной и мнимой составляющих. Для трансформаторов с зависимым регулированием модуль и угол коэффициента трансформации задаются одним и тем же числом – номером положения регулируемой отпайки. В этом случае в выражении (3) может применяться не коэффициент трансформации, а номер регулирующей отпайки. Для трансформаторов с независимым регулированием или энергороутеров (электронные устройства, соединяющие различные электрические сети и способные управлять модулями и фазовыми углами напряжения на одном из выходов) вместо одного выражения (3) появятся два отдельных выражения для двух независимых регуляторов. В данной статье в целях предотвращения непринципиального усложнения материала мы будем считать, что имеем дело только с вещественными коэффициентами трансформации. По той же причине в выражения целевой функции и её производных не введены поперечные составляющие, связанные с активными проводимостями линий и трансформаторов.
 Как видно из выражений (2) и (3), производные целевой функции могут рассчитываться в темпе реального времени, если нам известны частные производные типа называемые чувствительностями.
Как видно из выражений (2) и (3), производные целевой функции могут рассчитываться в темпе реального времени, если нам известны частные производные типа называемые чувствительностями.
Чувствительности поскольку их определение производится на основании фактических PMU-измерений, несут в себе всю реальную информацию о регулирующих эффектах нагрузки. В предлагаемом подходе не используются неизвестные де-факто традиционные статические характеристики нагрузки по напряжению и частоте.
Чувствительности,
будут определяться на основании PMU-измерений по фактам реализации управляющих воздействий (УВ) ΔQm и ΔKТk.
Таким образом, имея векторные измерения напряжений и зная чувствительности, мы получаем возможность рассчитывать частые производные целевой функции QU-оптимизации в темпе реального времени, которые дают точное представление о том, как будут меняться потери мощности при изменении переменных управления. Большие значения производных указывают на то, что ИРМ или трансформатор используется неоптимально и изменение его состояния существенно повлияет на потери. Малые производные, напротив, свидетельствуют об оптимальном использовании данного средства регулирования. Знаки при производных говорят о требуемом направлении (прибавить/убавить) оптимальных воздействий (ОВ).
Неизвестными остаются лишь абсолютные значения ОВ, определение которых возможно с использованием хорошо разработанных градиентных методов первого порядка. Однако эти методы хороши при работе с математическими моделями, позволяющими выполнять десятки промежуточных итераций для достижения оптимального решения. В случае же, когда роль математической модели исполняет реальная энергосистема, необходимы малошаговые методы, позволяющие достигать оптимального решения за один-два, максимум три шага.
Для резкого сокращения количества итераций оптимизации предлагается использовать методы второго порядка, оперирующие не только с первыми, но и со вторыми производными целевой функции. Высокая эффективность методов второго порядка при минимизации потерь мощности связана с квадратичной природой потерь, вытекающей из закона Джоуля-Ленца.
 (4),
(4),
Запишем условие оптимальности электрического режима энергосистемы без трансформаторов по критерию минимальных потерь мощности в точке t, вытекающее из разложения формулы потерь мощности в ряд Тейлора второго порядка (формула 4), или в матричной форме:
![]() (5),
(5),
где JQ π и HQ π – соответственно матрицы первых (Якоби) и вторых (Гессе) производных потерь по реактивной мощности ИРМ, ΔQ – искомая матрица оптимальных воздействий.
![]() (6),
(6),
Из выражения (6) следует, что при известных численных значениях элементов матриц Якоби и Гессе и при условии невырожденности матрицы Гессе ΔQ могут быть определены за один шаг. Элементы матрицы Гессе (симметричной квадратной матрицы вторых производных потерь от реактивных мощностей ИРМ размерностью M, определяемой числом ИРМ), формируются путём аналитического дифференцирования выражений первых производных (2).
Из выражения (7) видно, что все элементы матрицы Гессе могут быть рассчитаны по данным PMU-измерений и известным чувствительностям в темпе реального времени.
Таким образом, из (6), (3) и (7) следует возможность прямого вычисления ОВ для всех ИРМ в темпе реального времени по непосредственно измеряемым модулям и фазовым углам напряжений и эпизодически уточняемым чувствительностям.
Учитывая тот факт, что ОВ, рассчитываемые в темпе поступления PMU-измерений (1 раз в 20 мс), могут носить переменчивый, в том числе знакопеременный, характер, а также то, что оптимальное управление электрическим режимом в нормальных условиях не требует сверхвысокого быстродействия, на выходе системы умного регулирования напряжения целесообразно использовать интегрирующее звено, позволяющее сгладить и необходимым образом замедлить темп управления.
Также при переходе к практической реализации описанный подход должен быть дополнен механизмом учёта технологических ограничений по токам, потокам мощности и уровням напряжения. Методы учёта перечисленных ограничений могут основываться на введении в целевую функцию дополнительных членов – вспомогательных функций, умноженных на неопределённые множители. В этом случае целевая функция будет преобразована в функцию Лагранжа, нахождение безусловного минимума которой приводит к оптимальному решению с учётом ограничений.
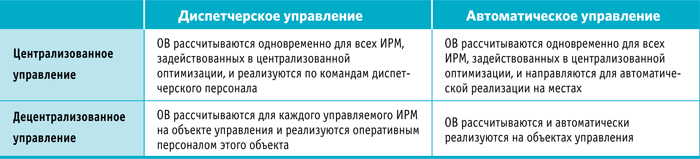
Возможные варианты реализации системы QU-оптимизации электрического режима, основанные на PMU-измерениях, представлены в таблице.
 (7),
(7),
Варианты реализации QU-оптимизации электрического режима
Заключение
Представлен подход к построению систем оптимального управления электрическими режимами электроэнергетических систем в реальном времени, действующих на основании PMU-измерений и не требующих математической модели сети. Роль математической модели исполняется физической моделью, которой является сама энергосистема.
Замена математической модели на физическую обеспечивает автоматический неявный учёт реальных статических характеристик нагрузки и, соответственно, корректность QU-оптимизации электрического режима.
Подход допускает возможность построения как централизованных, так и децентрализованных систем автоматического управления.

